1) - 단축 제어기 (RC1, RC1P)시리즈용 T/P

| 항 목 |
사 양 |
| key Pad |
22key,1 Emergency Key |
| Display |
16-character × 4 line LCD with Back Light |
| 보조기억장치 |
32kBytes S-RAM IC Card(Option사양) |
| Serial Interface |
RS-232C 1ch.(1축 Robot 제어기 전용) |
| 전원 |
DC 5V (1축 Robot 제어기 자체 전원 사용) |
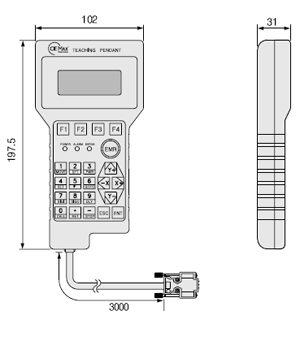
| 외형,치수(mm) |
102×197.5×31(W×H×D) |
| 중량 |
330g(Cable제외) |
| Cable길이 |
3m(RC1와 RC1P는 연결Cable이 다름) |
| RC1사용 TP모델명 |
RCT-1A1-1AA |
RC1P 및 RC1-BX2
사용 TP모델명 |
RC1-1A1-2AA |

ㅇ
| RUN (run모드) |
ZR (원점 복귀) |
| STE (스텝 실행) |
| AUT (연속 실행) |
| PCHG (프로그램 바꾸기) |
| PRO (프로그램 편집모드) |
EDT (프로그램 편집) |
| DE L(프로그램 지우기) |
| SAV (프로그램 불러오기) |
| CPY (프로그램 복사) |
| PST (프로그램 붙이기) |
| EXT (외부제어모드) |
|
| SET (파라메터 설정모드) |
EDT (파라메터 편집) |
| A/T (자동게인 설정) |
| SAV (파라메터 저장) |
| LOAD (파라메터 불러오기) |
|
PD (절대위치 데이터편집 모드) |
EDT (절대위치 데이터 편집) |
| SAV (절대위치 데이터 저장) |
| LOAD (절대위치 데이터 불러오기) |
| SD (상대위치 데이터편집 모드) |
EDT (상대위치 데이터 편집) |
| SAV (상대위치 데이터 저장) |
| LOAD (상대위치 데이터 불러오기) |
| MNU (수동 teaching 모드) |
STR (절대위치 저장) |
| JOG (jog teaching 모드) |
STR (절대위치 저장) |
| CSPD (JOG 속도변경) |
| SYST(system) |
RST (시스템 리셋) |
| EHIS (알람 히스토리) |
| VER (버젼) |
| OFF (서보ON/OFF) |

| 명령어 |
기 능 |
명령어 |
기 능 |
명령어 |
기 능 |
명령어 |
기 능 |
| MOVE |
절대위치 이동 |
ADD |
변수값 더하기 |
SIGI |
신호입력 |
JB |
조건점프(1 BIT) |
| PWR |
모터 전원
ON/OFF |
SFT |
상대위치 이동 |
OR |
변수값 논리연산(OR) |
JF |
조건점프(8 BIT) |
| DLY |
ROBOT
동작 대기 |
SUB |
변수값을 빼기 |
AND |
변수값 논리연산(AND) |
MF |
조건 절대위치 이동Ⅰ |
| GOTO |
프로그램이
분기 |
RET |
프로그램 복귀 |
INT |
인터럽트 설정 |
SF |
조건 상대위치 이동Ⅰ |
| CALL |
프로그램 호출 |
IF |
조건문 실행 |
L |
라벨번호 지정 |
CCLR |
위치 재설정 |
| SIGO |
신호출력 |
SPD |
속도 재설정 |
SIGB |
신호출력
(1 BIT) |
MB |
조건 절대위치 이동Ⅱ |
| STOP |
실행종료 |
ACC |
가감속 시간
재설정 |
WAIT |
조건대기 |
SB |
조건 상대위치 이동Ⅱ |
| SET |
변수값지정 |
|
|
|
|
|
|



 제품소개
제품소개